(translated from the English original; thanks to Daniel Corteletti)
Resumo: Escrevi um compilador que permite gerar código nativo para microcontroladores PIC16 e AVR a partir de um diagrama ladder. Suas características săo:
Este programa é livre. O código fonte e executáveis estăo disponíveis para download.
PLCs (Circuitos Lógicos Programáveis) săo geralmente programados em lógica ladder. Isso porquę os PLCs originalmente substituíram sistemas de controle baseados em lógica de relés, e quarenta anos depois, ainda permanecemos utilizando esta linguagem. Um PLC, assim como um microprocessador, executa uma lista de instruçőes em seqüęncia. Ferramentas ladder deixam isso transparente; vocę pode programar o PLC ligando os contatos de relés e bobinas na tela, e o interpretador PLC irá simular o circuito que vocę desenhou. Alguns contatos de relés podem ser ligados a sinais de entrada reais; Algumas das bobinas podem ser ligadas a saídas. Desta forma, vocę pode fazer a simulaçăo de seu circuito e interagir com outros dispositivos, e até controlar coisas. Este é o objetivo.
Na verdade ele é mais amplo do que isso, porque vocę pode incorporar temporizadores e contadores e operaçőes aritméticas que năo poderiam ser (facilmente) executados somente com relęs convencionais. O projeto do circuito ainda é útil năo só porque ele é intuitivo, mas também porque abstrai facilmente a concorręncia. Isso funciona assim:
|| Xa Xb Yout ||
1 ||-------] [------+-------] [------+-------( )-------||
|| | | ||
|| | Xc | ||
|| +-------]/[------+ ||
Isto é um simples trecho de uma lógica de combinaçőes. Existem os termos de entrada , Xa, Xb e Xc. Existem termos de saída: Yout. A expressăo é Yout := Xa e (Xb ou (năo Xc)). Isso faz mais sentido se vocę pensar em Xa e Xb como relés de contato NA (normalmente aberto), Xc como um relé de contato NF (normalmente fechado) e Yout como uma bobina de um relé ou contactora. Claro que podemos encontrar circuitos mais complexos, como o que segue:
|| ||
|| Asetpoint ||
1 ||-------------------------------------{READ ADC}----||
|| ||
|| Atemperature ||
||-------------------------------------{READ ADC}----||
|| ||
|| ||
|| ||
|| ||
|| {SUB min_temp :=} ||
2 ||------------------------{ Asetpoint - 20 }--------||
|| ||
|| {ADD max_temp :=} ||
||------------------------{ Asetpoint + 20 }--------||
|| ||
|| ||
|| ||
|| ||
||[Atemperature >] Yheater ||
3 ||[ max_temp ]+------------------------(R)-------||
|| | ||
|| Xenable | ||
||-------]/[------+ ||
|| ||
||[Atemperature <] Xenable Yheater ||
||[ min_temp ]--------] [--------------(S)-------||
|| ||
|| ||
|| ||
|| ||
|| {SUB check_temp :=} ||
4 ||-----------------------{ Asetpoint - 30 }-------||
|| ||
|| ||
|| ||
|| ||
||[Atemperature >] Yis_hot ||
5 ||[ check_temp ]-------------------------( )-------||
|| ||
|| ||
|| ||
||------[END]----------------------------------------||
|| ||
|| ||
Trata-se de um simples termostato. Há duas entradas analógicas; uma delas é para o set point, para que seja possível, por exemplo, ligar um potenciômetro para o usuário definir a temperatura desejada. A outra é usada para mediçőes de temperatura, conectado a um sensor de temperatura baseado em semicondutores, ou um termopar com interface apropriada. Existe uma saída digital, Yheater. Isso pode ser usado para controlar um elemento de aquecimento, através de um comutador apropriado (um TRIAC, ou um relé, ou um relé de estado sólido, ou seja o que for).
O ciclo foi fechado com uma simples histerese. Nos definimos mais ou menos 20 unidades do ADC para histerese. Isso significa que quando a temperatura cai abaixo (setpoint - 20), será ligado o aquecimento. e quando isso ultrapassar (setpoint + 20), o aquecimento será desligado.
Eu ainda acresci algumas coisinhas. Primeiramente, há uma entrada de ativaçăo: o aquecedor é forçado a desligar quando Xenable está em nível baixo. Eu também adicionei uma lâmpada indicadora, Yis_hot, para indicar que a temperatura está na faixa pretendida. Isso é feito de modo a comparar continuamente com o limite imposto (setpoint-20) de forma que a luz năo fique piscando nos ciclos normais do termostato.
Este é um exemplo trivial, mas deve ficar claro que a linguagem é bastante expressiva. Logica ladder năo é uma linguagem de propósito geral, mas é uma linguagem "Turing-completa", aceita na industria, e, para uma classe limitada de problemas (orientados a controle), surpreendentemente conveniente.
Acredita-se que os microcontroladores modernos de baixo custo (abaixo de US$ 3,00) passaram a ter o poder computacional de um PLC a partir de 1975. Eles passaram a processar mais MIPS para rodar uma lógica ladder relativamente complexa com um ciclo de vida de alguns milisegundos. Eu penso que PLCs normalmente tem uma espécie de programa do tipo "interpretador" ou "máquina virtual", mas se desejarmos realizar uma lógica simples em um processador sem muita memória entăo um compilador pode ser uma idéia melhor.
Entăo eu escrevi um compilador. Vocę começa com um degrau (linha) vazio. Vocę pode adicionar contatos (entrada) e bobinas (saídas) e estruturas mais complicadas para construir seus programas. Temporizadores (TON, TOF, RTO) também săo suportados. As duraçőes máximas e mínimas dependem do ciclo de tempo do 'PLC', o qual é configurável; Os temporizadores podem contar deste milisegundos até dezenas de minutos. Á contadores e operaçőes aritméticas (adiçăo, subtraçăo, multiplicaçăo, divisăo).
Elementos de circuito podem ser adicionados em série ou em paralelo com outros elementos existentes. E uma lista de entradas e saídas é construída a partir do diagrama lógico traçado. Vocę tem relęs internos (Rfoo), que usam posiçőes de memória alocadas automaticamente, ou entradas (Xfoo) e saídas (Yfoo), para associar a pinos do microcontrolador. A seleçăo dos pinos disponíveis depende do microcontrolador. Tentamos manter suporte para a maioria dos mais populares microcontroladores PICs e AVRs (veja abaixo).
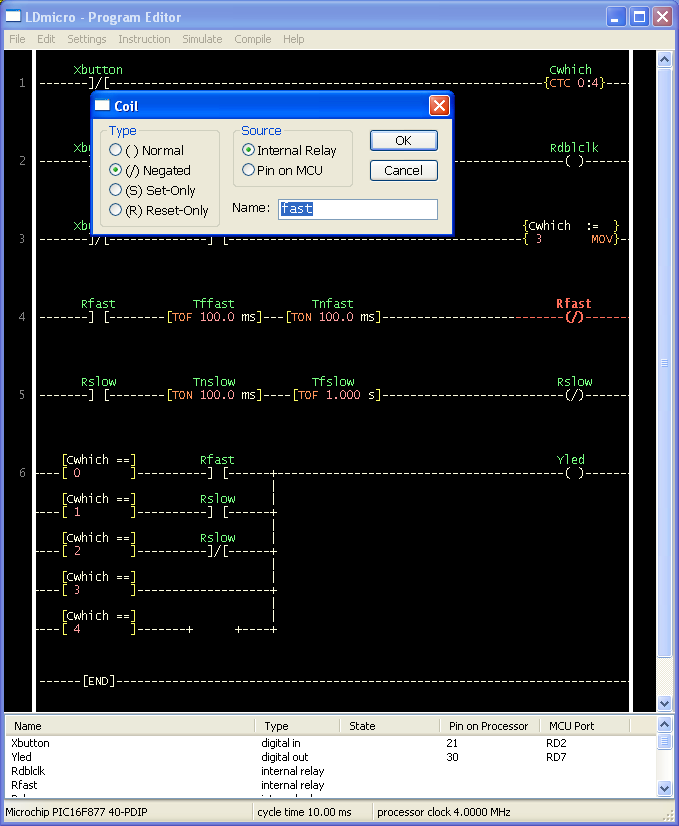
Vocę pode editar o programa na forma gráfica:
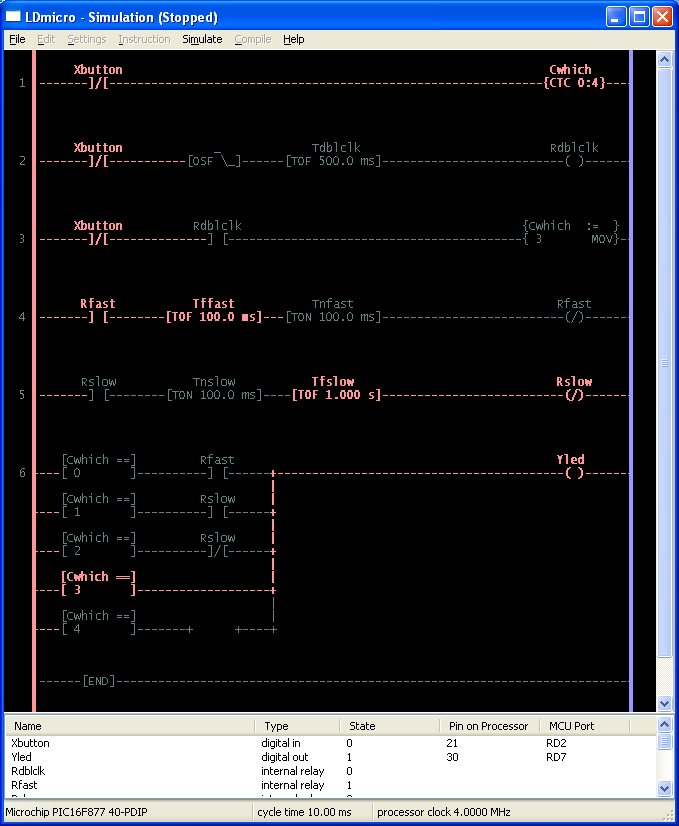
Entăo vocę pode testar o programa simulando-o em tempo real. O programa aparecera na tela com os elementos ativados (ligados) representados por colchetes em uma cor mais intensa, o que torna fácil a depuraçăo. O estado das variáveis é mostrado na parte de baixo da tela, na lista de entradas e saídas (I/O list).
Depois do programa ter funcionado na simulaçăo, vocę pode associar pinos para as entradas e saídas, gerar o código PIC ou AVR. A geraçăo do código năo é difícil. Para o AVR, um bom alocador de registradores proverá uma maior velocidade. Se vocę quer ter uma otimizaçăo de código ainda mais apurada, poderá aplicar algumas regras de reduçăo de algoritmos, e talvez reduçăo de estados também. Isso seria muito mais difícil.
Mesmo ignorando isso, meu código gerador para os AVRs é muito pobre. O "back end" AVR ainda gera código PIC... por exemplo, ele năo tira vantagem do fato do AVR ter mais de um registrador. Muitos dos códigos gerados ficam pouco otimizados. O "back end" para PIC é melhor, e năo é muito grande. Mas nada disso importa muito se vocę estiver tentando rodar algumas dezenas de degraus de uma lógica ladder com tempo de ciclo rápido.
Há suporte para conversor A/D, unidade PWM e UART nos microcontroladores utilizados. Isso significa que vocę pode escrever lógica ladder que leia uma entrada analógica, e que possa enviar e receber caracteres pela serial (por exemplo, para um PC, se vocę adicionar um MAX232, ou um display LCD de caracteres). Isso é possível mandando seqüęncia de caracteres através da serial, assim como o valor de variáveis inteiras, como texto ASCII. E por último, fora adicionado suporte a variáveis em EEPROM; Vocę pode indicar que uma variável específica irá ser salva automaticamente em uma área de memória năo volátil, que será mantida ao se desconectar a energia.
Naturalmente um microcontrolador com este software năo pode fazer tudo que um PLC faz. Muitos PLCs oferecem mais características e blocos predefinidos que minha ferramenta. O Hardware de um PLC é melhor também; usualmente as entradas e saídas săo projetadas para suportar alteraçőes elétricas. Vocę pode montar um PIC16F877 em uma protoboard por alguma dezena de dólares, mas vocę pagará mais caro por um PLC com as mesmas capacidades.
Até agora, tenho recebido muito poucos relatos de erros, em comparaçăo com o número de pessoas com perguntas e dúvidas. Existe ainda uma grande possibilidade de defeitos, especialmente nos microcontroladores que năo tenho fisicamente (e portanto, năo podemos testar). Certamente, năo use o LDmicro para alguma aplicaçăo segura ou crítica, ou em algo que possa se torar caro se isso falhar.
Com citado anteriormente, o código gerado está longe do "otimo". Também, nem toda a memória RAM nos dispositivos PIC16 está disponível para o programa na lógica ladder. Isso porque năo implementei muito código para suporte a paginaçăo. Eu fiz, no entanto, suporte para a memória de paginaçăo do programa, para permitir acesso a memória ROM nos PIC16 acima de 2k.
O programa é testado sobre Windows XP. Relatos informais sugerem que ele pode trabalhar sobre windows 98, a sobre o Wine. O arquivo de download é um arquivo .exe; năo há outro arquivo requerido, e năo há arquivo de instalaçăo. Salve-o em algum lugar no seu computer, e execute-o. O manual está incluído no arquivo .exe, mas vocę pode realizar download separadamente se vocę desejar.
O compilador irá gerar arquivos no formato Intel IHEX. Muitos dos softwares programadores que eu tenho usam este formato. Naturalmente vocę irá precisar de um programador para transferir o programa para a memória do microcontrolador. Para os AVRs, eu recomendo o tipo STK300, paralelo, como o Olimex. Para os PICs, eu recomendo o Microchip PICkit 2, como o disponível nesta loja virtual.
Agradecemos relatórios de erros. Os seguintes microcontroladores foram testados e săo suportados:
Os microcontroladores abaixo săo suportados, mas năo foram testados; eles devem funcionar, mas năo há garantia. Se vocę testar, e isso funcionar adequadamente, entre em contato comunicando. Nós agradecemos.
O arquivo ladder também é possível se gerar código C. Isso é menos conveniente, mas vocę pode usar isso em algum processador se vocę possuir um compilador C.
LDmicro pode gerar um código interpretável. Se estiver escrevendo um interpretador vocę pode usa-lo para gerar o código ladder para outro tipo de dispositivo. Năo há mita documentaçăo sobre isso, mas eu construí um interpretador simples em linguagem C bastante portável.
As compilaçőes săo disponíveis em diversas línguas:
E o código fonte, e vários outros arquivos, também estăo disponíveis para download. Este programa pode ser distribuído sob os termos da GPL Version 3.
Versőes antigas estăo disponíveis:
(botăo direito para salvar qualquer um destes arquivos.)
Por favor, relate qualquer defeito. Este é um software livre, sem nenhum departamento responsável pelo controle de qualidade. Eu mesmo năo tenho o hardware para testar a maioria dos dispositivos. Um erro năo informado năo poderá ser corrigido.
Tenho um tutorial, no qual eu descrevo como gerar um simples diagrama ladder, simulá-lo e entăo gerar o arquivo IHEX e programá-lo no PIC. Esta é provavelmente a maneira mais fácil de começar a usar este software.
Dezembro de 2007, Seattle.